『データを取得する』もちろん、これも骨の折れる作業ですが、yepはその先にある『データを使い、お客様の要望をどう実現するか』に真摯に向き合ってきました。データの入手方法をはじめ、どんな技術を使えば実現できるのか、どんな環境を整えれば実現できるのか。多彩な経験を持つエンジニアたちが、お客様と一緒になって、叶えたかったものを丁寧にかたちにしていきます。一部ではありますが、yepの関わってきた技術のご紹介をさせていただきます。
技術紹介
WebRTC(Web Real-Time Communication)
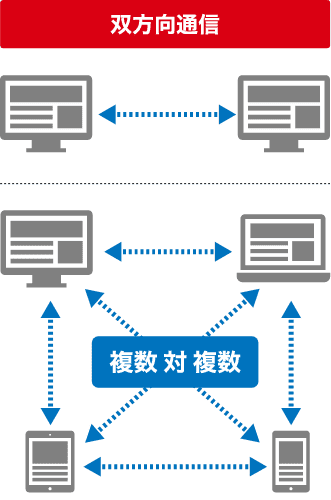
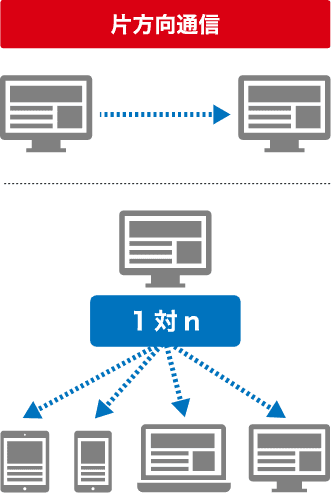
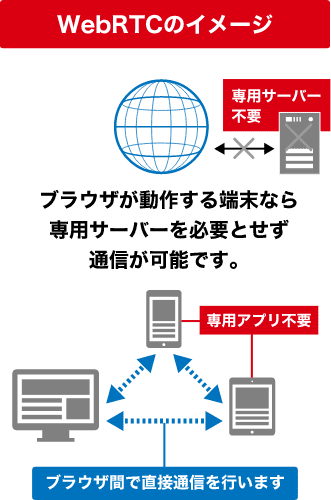
WebRTC(Web Real-Time Communication)は、パソコンやスマートフォンのブラウザで、サーバーを介さないP2P(Peer to Peer)のリアルタイム通信(動画・音声・チャット・データ)を実現するシステムです。従来の通信方法では人数が多くなる度にサーバーを増強する必要がありましたが、WebRTCではサーバーを介さず、デバイス同士を直接繋げることにより、コストが掛からないことで注目を浴びています。近年では、音声通話・ビデオ通話のWebツールで取り入れられている技術です。
WebRTCの応用例
Web会議
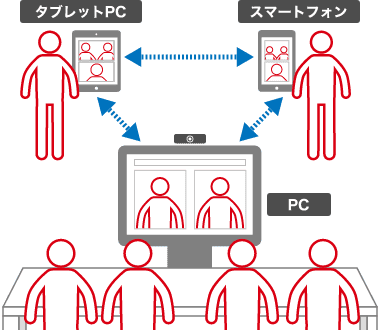
パソコンとスマートフォンがインターネットに接続できれば、誰でも簡単に参加できることが最大の利点です。専用の機器を必要としないので、会議の場所を選びません。
コンタクトセンター
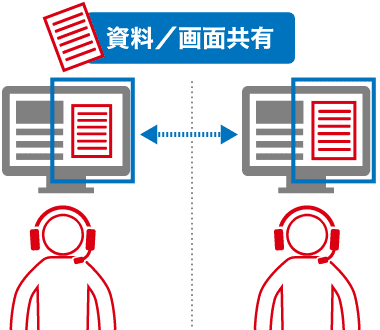
電話や別アプリに切替せず、Webサイト内で処理を完結できることが最大の利点です。ログイン情報を引き継げ、資料や画面を容易に共有することもできます。
※イメージしやすい例としては、Skypeのような動画・テキストチャットになります。
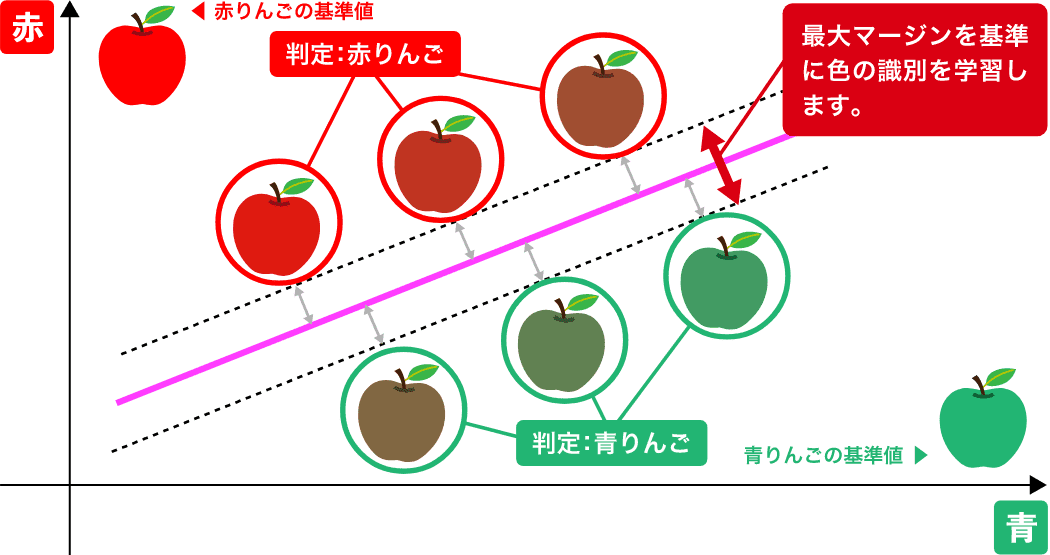
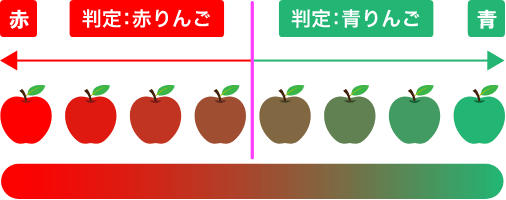
SVM(Support Vector Machine)
SVM(Support Vector Machine)とは、機械学習を用いるパターン認識手法の一つで、データの集合体をクラス分類する識別関数のことです。SVMはサンプルから、各データ点との距離が最大となるマージン最大化超平面を求める基準で線形入力素子のパラメータを学習します。
ROS(Robot Operating System)
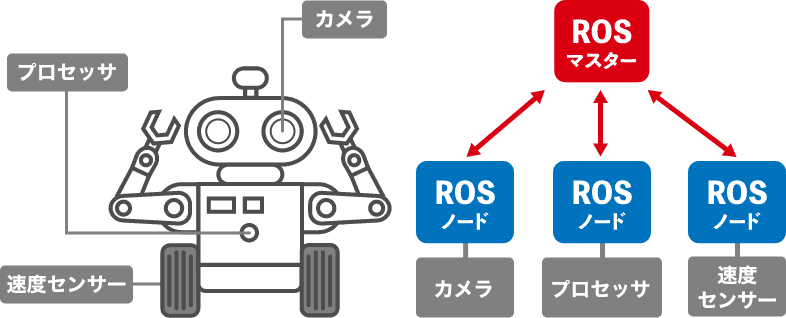
ROS(Robot Operating System)とは、ロボット向けの開発ツールなどのオープンソフトウェアのことです。ROSは「分散処理」システムを採用し、産業用ロボットと相性が良いと言われています。ロボットの座標やセンサーなどの独立したソフトウェアをROSノードと呼び、トピック・サービスを介して情報処理や司令を受け取り、最適な運用・管理するものをROSマスターと呼ばれています。ROSの使用する最大のメリットは、バイナリファイルがROSを通すことで整形された状態ですぐ使えることです。yepではROSを使用し応用した案件を取扱っています。
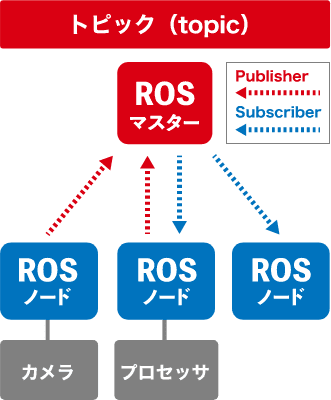
トピック(topic)とは、ROSマスターを介してノード間で通信をするデータのことです。常にデータを発信しており、送信側(Publisher)・通信側(Subscriber)はお互いがどのようにデータを送受信をしているかは関知しません。トピックは1対1通信だけでなく1対多数通信が行えます。
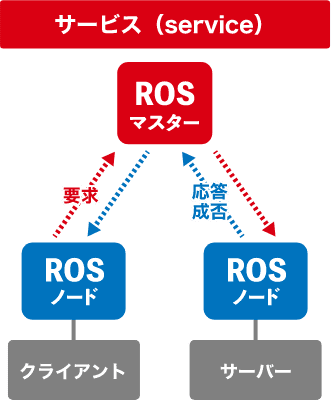
サービス(service)とは、相手の状態に関係なく通信しているトピックに対し、サービスは要求があったときのみ応答します。サービスは要求するクライアントと応答するサーバと言い、クライアント側は応答の成否を知ることができます。サービスは1対1の同期通信になります。
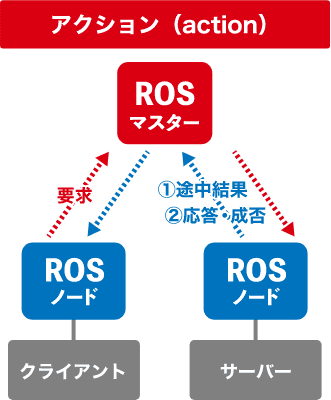
アクション(action)は要求するクライアントと応答するサーバがあり、処理が長く応答までの時間が要する時に使用され、処理途中の結果を受け取ることが可能です。アクションは1対1の非同期通信になります。
LIDAR(Light Detection and Ranging)
LIDAR(Light Detection and Ranging)とは、目標物にレーザ光を照射して目標物までの距離測定や性質を特定する、光センサー技術のことです。生産工場の障害物検知、空間マッピングなどに用いられています。
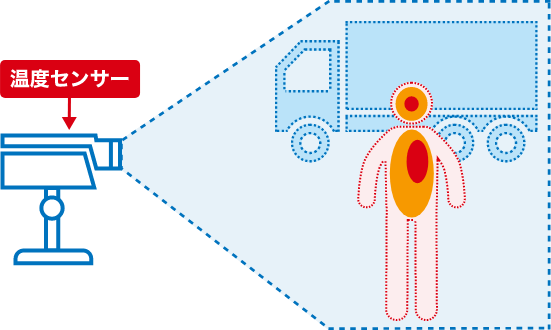
Sensor
Sensorは、音・温度・光・圧力・流量などの、空間情報・時間情報といった物理量を検知し、機械が扱い易い信号に変換する装置のことです。使用例としては、温度センサー、ガス警報器などに多く用いられています。 yepは、このような技術を活かした案件も取扱っております。